Juan Jesús Roldán Gómez. Centro de Automática y Robótica (CAR: UPM-CSIC)
Los robots se están abriendo paso en la agricultura, al igual que se hicieron un hueco en la industria. La agricultura presenta dificultades que no presenta la industria, como entornos más irregulares o tareas más complejas. Estos retos exigen que los robots agrícolas sean robustos y versátiles, capaces de adaptarse a múltiples tareas y trabajar en escenarios complejos y cambiantes. A pesar de esto, la presencia de robots en la agricultura ha experimentado un crecimiento significativo en los últimos años. A día de hoy se pueden destacar dos tendencias: la agricultura de precisión y la agricultura en invernadero.
La agricultura de precisión surgió a finales del siglo pasado y alcanzó su madurez en los últimos años. Esta disciplina se basa en el estudio de la variabilidad espacial y temporal de los cultivos para mejorar la producción y optimizar los recursos. Con este objetivo, la agricultura de precisión emplea tecnologías como los sistemas de navegación por satélite, los sensores y las cámaras aerotransportados, los sistemas de información geográfica, los modelos del clima y los robots tanto terrestres como aéreos. En este contexto, los robots pueden desempeñar múltiples tareas como la siembra distribuida, el riego, el suministro de fertilizantes, la toma de imágenes, la inspección de los cultivos o la cosecha selectiva.

Uno de los mejores ejemplos de agricultura de precisión es el Proyecto RHEA (Robot Fleets for Highly Effective Agricultural and Forestry Management). Este proyecto fue financiado por la Comisión Europea y desarrollado por varias universidades y empresas de Europa. El objetivo del proyecto era la reducción en un 75% del uso de productos químicos en actividades agrarias para mejorar la calidad de los cultivos, la seguridad de las personas y los costes de la producción. Con este fin, el proyecto RHEA propuso un sistema multi-robot con unidades aéreas y terrestres. Los robots aéreos se utilizaron para tomar fotografías aéreas de los campos, que permitían identificar las malas hierbas entre los cultivos. Por su parte, los robots terrestres se emplearon para aplicar con precisión los tratamientos a las malas hierbas [1].
La agricultura en invernadero siempre ha sido un terreno propicio para aplicar las nuevas tecnologías. Algunos ejemplos son los sistemas de control del clima, la preparación del suelo, los avances en el riego o los sistemas de control de enfermedades y plagas. En este contexto, los robots pueden realizar algunas tareas que suponen un riesgo para la salud de las personas, tales como la monitorización ambiental, la inspección de los cultivos, la detección de enfermedades y plagas y la aplicación de ciertos tratamientos.
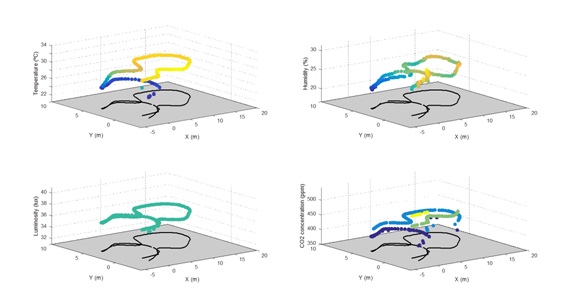
En este sentido, hay varios grupos en universidades y centros de investigación españoles que están trabajando en el uso de robots en diferentes tareas de la agricultura bajo plásticos. En el Grupo de Robótica y Cibernética (RobCib) del Centro de Automática y Robótica (CAR) – un centro mixto de la Universidad Politécnica de Madrid (UPM) y del Consejo Superior de Investigaciones Científicas (CSIC) – nos hemos centrado en la monitorización de variables ambientales. Esta tarea consiste en la medida de forma continua y distribuida de variables como la temperatura, la humedad, la iluminación o la concentración de ciertos gases. Estas variables son determinantes en el crecimiento de las plantas y la maduración de sus frutos y, por tanto, su conocimiento permite mejorar tanto la productividad como la calidad.
En la primera experiencia se empleó un cuadricóptero (un robot aéreo propulsado por cuatro hélices) equipado con sensores para medir la temperatura, la humedad, la iluminación y la concentración de dióxido de carbono. En este trabajo se estudiaron los flujos de aire del cuadricóptero y se determinó la localización óptima para los sensores. Además, se realizaron pruebas en un invernadero productivo que demostraron que era posible la medida de estas variables desde el dron con una precisión adecuada [2].
A continuación se empleó un robot terrestre con una herramienta para realizar pequeñas perforaciones en el suelo y sensores para medir la temperatura y la humedad del mismo. Estos trabajos pusieron de manifiesto las posibilidades y las limitaciones de los robots terrestres y aéreos en los invernaderos. Los drones son más rápidos y ágiles y pueden tomar medidas a diferentes alturas, pero sus autonomías son menores y tienen dificultades para localizarse entre las plantas. Por su parte, los robots terrestres son más autónomos y robustos y pueden recorrer el invernadero durante varias horas, pero necesitan más tiempo para completar los recorridos y no son capaces de medir a diferentes alturas.
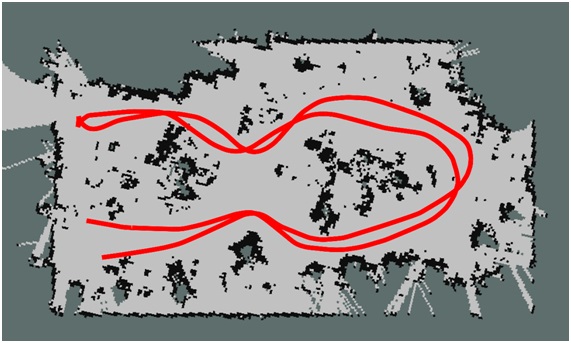
En la experiencia más reciente se optó por formar un equipo con los robots aéreo y terrestre, de manera que cada robot desempeñara las tareas que se le dan mejor y el equipo realizara el trabajo con mayor eficiencia. Siguiendo esta estrategia, el robot terrestre recorría el invernadero de manera autónoma empleando un mapa adquirido previamente y sus sensores de posición y presencia. Durante la ruta, el robot terrestre cargaba con el aéreo y tomaba medidas de temperatura, humedad, iluminación y concentración de dióxido de carbono. Cuando el robot terrestre encontraba un obstáculo que impedía su avance o detectaba una medición anómala, el robot aéreo entraba en acción, describiendo una ruta para evitar el obstáculo o investigando las causas de la anomalía y luego regresando sobre el robot terrestre [3].
En resumen, las flotas de robots que cuidan los cultivos en los invernaderos aún tienen que dar el salto del mundo experimental al productivo. Algunos de los retos son el incremento de la autonomía de los robots (aumentar la duración de las baterías y estudiar sistemas de carga rápida o inalámbrica) y la mejora de las técnicas de navegación en entornos con alta densidad de obstáculos. En principio, estos sistemas multi-robot supondrían una inversión inicial en acondicionar el invernadero y adquirir los robots y proporcionarían una rentabilidad por la mejoría de la producción y la calidad y el ahorro de recursos por tratamientos más precisos.
Referencias:
[1] P. Gonzalez-de-Santos, A. Ribeiro, C. Fernandez-Quintanilla, F. Lopez-Granados, M. Brandstoetter, S. Tomic, S. Pedrazzi, A. Peruzzi, G. Pajares, G. Kaplanis, M. Perez-Ruiz, C. Valero, J. del Cerro, M. Vieri, G. Rabatel and B. Debilde. Fleets of robots for environmentally-safe pest control in agriculture. Precision Agriculture, 2016, 1-41. http://oa.upm.es/43791/1/11119-016-9476-3.pdf
[2] J.J. Roldán, G. Joossen, D. Sanz, J. del Cerro and A. Barrientos. Mini-UAV Based Sensory System for Measuring Environmental Variables in Greenhouses. Sensors, 2015, 15(2), 3334-3350. http://www.mdpi.com/1424-8220/15/2/3334
[3] J.J. Roldán, P. Garcia-Aunon, M. Garzón, J. de León, J. del Cerro and A. Barrientos. Heterogeneous Multi-Robot System for Mapping Environmental Variables of Greenhouses. Sensors, 2016, 16(7), 1018. http://www.mdpi.com/1424-8220/16/7/1018